Figure 1: Two Isometric Joysticks
Obviously, such conclusions do not accurately describe humans of the twentieth century. But they would be perfectly warranted based on the available information. Today's systems have severe shortcomings when it comes to matching the physical characteristic of their operators. Admittedly, in recent years there has been a great improvement in matching computer output to the human visual system. We see this in the improved use of visual communication through typography, color, animation, and iconic interfacing. Hence, our speculative future anthropologist would be correct in assuming that we had fairly well developed (albeit monocular) vision.
In our example, it is with the human's effectors (arms, legs, hands, etc.) that the greatest distortion occurs. Quite simply, when compared to other human operated machinery (such as the automobile), today's computer systems make extremely poor use of the potential of the human's sensory and motor systems. The controls on the average user's shower are probably better human-engineered than those of the computer on which far more time is spent. There are a number of reasons for this situation. Most of them are understandable, but none of them should be acceptable.
My thesis is that we can achieve user interfaces that are more natural, easier to learn, easier to use, and less prone to error if we pay more attention to the "body language" of human computer dialogues. I believe that the quality of human input can be greatly improved through the use of appropriate gestures. in order to achieve such benefits, however, we must learn to match human physiology, skills, and expectations with our systems' physical ergonomics, control structures, and functional organization.
In this chapter I look at manual input with the hope of developing better understanding of how we can better tailor input structures to fit the human operator.
Just consider the use of the feet in sewing, driving an automobile or in playing the pipe organ. Now compare this to your average computer system. The feet are totally ignored despite the fat that most users have them, and furthermore, have well developed motor skills in their use.
I resist the temptation to discuss exotic technologies. I want to
stick with devices that are real and available, since we haven't come close
to using the full potential of those that we already have.
Finally, my approach is somewhat cavalier. I will leap from example to example, and just touch on a few of the relevant points. In the process, it is almost certain that readers will be able to come up with examples counter to my own, and situations where what I say does not apply. But these contradictions strengthen my argument! Input is complex, and deserves great attention to detail: more than it generally gets. That the grain of my analysis is still not fine enough just emphasizes how much more we need to understand.
Managing input is so complex that it is unlikely that we will ever totally understand it. No matter how good our theories are, we will probably always have to test designs through actual implementations and prototyping. The consequence of this for the designer is that the prototyping tools (software and hardware) must be developed and considered as part of the basic environment.
An important concept in modern interactive systems is the notion of device independence. The idea is that input devices fall into generic classes of what are known as virtual devices, such as "locators" and "valuators." Dialogues are described in terms of these virtual devices. The objective is to permit the easy substitution of one physical device for another of the same class. One benefit in this is that it facilitates experimentation (with the hopeful consequence of finding the best among the alternatives). The danger, however, is that one can be easily lulled into believing that the technical interchangeability of these devices extends to usability. Wrong! It is always important to keep in mind that even devices within the same class have very idiosyncratic difference that determine the appropriateness of a device for a give context. So, device independence is a useful concept, but only when additional considerations are made when making choices.
Figure 1: Two Isometric Joysticks
Example 1: The Isometric Joystick
An isometric joystick is a joystick whose handle does not move when
it is pushed. Rather, its shaft senses how hard you are pushing it, and
in what direction. It is, therefore, a pressure-sensitive device. Two isometric
joysticks are shown in Figure 1. They are both made by the same manufacturer.
They cost about the same, and are electronically identical. In fact, they
are plug compatible. How they differ is in their size, the muscle groups
that they consequently employ, and the amount of force required to get
a given output.
Remember, people generally discuss joysticks vs mice or trackballs. Here we are not only comparing joysticks against joysticks, we are comparing one isometric joystick to another.When should one be used rather than the other? The answer obviously depends on the context. What can be said is that their differences may often be more significant than their similarities. In the absence of one of the pair, it may be better to utilize a completely different type of transducer (such as a mouse) than to use the other isometric joystick.
Example 2: Joystick vs. Trackball
Let's take an example in which subtle idiosyncratic differences have
a strong effect on the appropriateness of the device for a particular transaction.
In this example we will look at two different devices. One is the joystick
shown in Figure 2(a).


(a)
(b)
Figure 2: A 3-D Joystick (a) and a 3-D Trackball (b).
In many ways, it is very similar to the isometric joysticks seen in the previous example. It is made by the same manufacturer, and it is plug-compatible with respect to the X/Y values that it transmits. However, this new joystick moves when it is pushed, and (as a result of spring action) returns to the center position when released. In addition, it has a third dimension of control accessible by manipulating the self-returning spring-loaded rotary pot mounted on the top of the shaft.
Rather than contrasting this to the joysticks of the previous example (which would, in fact, be a useful exercise), let us compare it to the 3-D trackball shown in Figure 2(b). (A 3-D trackball is a trackball constructed so as to enable us to sense clockwise and counter-clockwise "twisting" of the ball as well as the amount that it has been"rolled" in the horizontal and vertical directions.)
This trackball is plug compatible with the 3-D joystick, costs about the same, has the same "footprint" (consumes the same amount of desk space), and utilizes the same major muscle groups. It has a great deal in common with the 3-D joystick of Figure 2(a).
In many ways the trackball has more in common with the joystick in Figure 2(a) than do the joysticks shown in Figure 1!
If you are starting to wonder about the appropriateness of always characterizing input devices by names such as "joystick" or "mouse", then the point of this section is getting across. It is starting to seem that we should lump devices together according to some "dimension of maximum significance", rather than by some (perhaps irrelevant) similarity in their mechanical construction (such as being a mouse or joystick). The prime issue arising from this recognition is the problem of determining which dimension is of maximum significance in a given context. Another is the weakness of our current vocabulary to express such dimensions.
Despite their similarities, these two devices differ in a very subtle,
but significant, way. Namely, it is much easier to simultaneously control
all three dimensions when using the joystick than when using the trackball.
In some applications this will make no difference. But for the moment,
we care about instances where it does. We will look at two scenarios.
Scenario 1: CAD
We are working on a graphics program for doing VLSI layout. The chip
on which we are working is quite complex. The only way that the entire
mask can be viewed at one time is at a very small scale. To examine a specific
area in detail, therefore, we must "pan" over it, and "zoom in". With the
joystick, we can pan over the surface of the circuit by adjusting the stick
position. Panning direction is determined by the direction in which the
spring-loaded stick is off-center, and speed is determined by its distance
off-center. With the trackball, we exercise control by rolling the ball
in the direction and at the speed that we want to pan.
Panning is easier with trackball than the spring-loaded joystick. This is because of the strong correlation (or compatibility) between stimulus (direction, speed and amount of roll) and response (direction, speed and amount of panning) in this example. With the spring-loaded joystick, there was a position-to-motion mapping rather than the motion-to-motion mapping seen with the trackball. Such cross-modality mappings require learning and impede achieving optimal human performance. These issues address the properties of an interface that Hutchins, Hollan and Norman (Chapter 5) call "formal directions."
If our application demands that we be able to zoom and pan simultaneously,
then we have to reconsider our evaluation. With the joystick, it is easy
to zoom in and out of regions of interest while panning. One need only
twist the shaft-mounted pot while moving the stick. However, with the trackball,
it is nearly impossible to twist the ball at the same time that it is being
rolled. The 3D trackball is, in fact, better described as a 2+1D device.
Scenario 2: Process Control
I am using the computer to control an oil refinery. The pipes and valves
of a complex part of the system are shown graphically on the CRT, along
with critical status information. My job is to monitor the status information
and when conditions dictate, modify the system by adjusting the settings
of specific valves. I do this by means of direct manipulation. That
is, valves are adjusted by adjusting their graphical representation on
the screen. Using the joystick, this is accomplished by pointing at the
desired valve, then twisting the pot mounted on the stick. However, it
is difficult to twist the joystick-pot without also causing some change
in the X and Y values. This causes problems, since graphics pots may be
in close proximity on the display. Using the trackball, however, the problem
does not occur. In order to twist the trackball, it can be (and is best)
gripped so that the finger tips rest against the bezel of the housing.
The finger tips thus prevent any rolling of the ball. Hence, twisting is
orthogonal to motion in X and Y. The trackball is the better transducer
in this example precisely because of its idiosyncratic 2+D property.
Thus, we have seen how the very properties that gave the joystick the advantage in the first scenario were a liability in the second. Conversely, with the trackball, we have seen how the liability became an advantage. What is to be learned here is that if such cases exist between these two devices, then it is most likely that comparable (but different) cases exist among all devices. What we are most lacking is some reasonable methodology for exploiting such characteristics via an appropriate matching of device idiosyncrasies with structures of the dialogue.
Having raised the issue, we will continue to discuss devices in such a way as to focus on their idiosyncratic properties. Why? Because by doing so, we will hopefully identify the type of properties that one might try to emulate, should emulation be required.
It is often useful to consider the user interface of a system as being made up of a number of horizontal layers. Most commonly, syntax is considered separately from semantics, and lexical issues independent from syntax. Much of this way of analysis is an outgrowth of the theories practiced in the design and parsing of artificial languages, such as in the design of compilers for computer languages. Thinking of the world in this way has many benefits, not the least of which is helping to avoid "apples-and-bananas" type comparisons. There is a problem, however, in that it makes it too easy to fall into the belief that each of these layers is independent. A major objective of this section is to point out how false an assumption this is. In particular, we will illustrate how decisions at the lowest level, the choice of input devices, can have a pronounced effect on the complexity of the system and on the user's mental model of it.

(a) Etch-a-Sketch
(b) Skedoodle
With the Etch-a-Sketch (a), two 1 dimensional controls (rotary potentiometers) are used for drawing. With the Skedoodle (b) one two dimensional control (a joystick) is used .
Figure 3: Two "semantically identical" Children's Drawing Toys
The Skedoodle (shown in Figure 3(b)) is another toy based on very similar principles. In computerese, we could even say that the two toys are semantically identical. They draw using a similar stylus mechanism and even have the same "erase" operator (turn the toy upside down and shake it). However, there is one big difference. Whereas the Etch-a-Sketch has a separate control for each of the two dimensions of control, the Skedoodle has integrated both dimensions into a single transducer: a joystick.
(a) Geometric Figure
(b) Cursive Script
Figure 4: Two Drawing Tasks
Since both toys are inexpensive and widely available, they offer an excellent opportunity to conduct some field research. Find a friend and demonstrate each of the two toys. Then ask him or her to select the toy felt to be the best for drawing. What all this is leading to is a drawing competition between you and your friend. However, this is a competition that you will always win. The catch is that since your friend got to choose toys, you get to choose what is drawn. If your friend chose the Skedoodle (as do the majority of people), then make the required drawing be of a horizontally-aligned rectangle, as in Figure 4a. If they chose the Etch-a-Sketch, then have the task be to write your first name, as in Figure 4b. This test has two benefits. First, if you make the competition a bet, you can win back the money that you spent on the toys (an unusual opportunity in research). Secondly, you can do so while raising the world's enlightenment about the sensitivity of the quality of input devices to the task to which they are applied.
If you understand the importance of the points being made here, you are hereby requested to go out and apply this test on every person that you know who is prone to making unilateral and dogmatic statements of the variety "mice (tablets, joysticks, trackballs, ...) are best". What is true with these two toys (as illustrated by the example) is equally true for any and all computer input devices: they all shine for some tasks and are woefully inadequate for others.We can build upon what we have seen thus far. What if we asked how we can make the Skedoodle do well at the same class of drawings as the Etch-a-Sketch? An approximation to a solution actually comes with the toy in the form of a set of templates that fit over the joystick (Figure 5).

Figure 5: Skedoodle with Templates
Example 3: The Nulling Problem.
One of the most important characteristics of input devices is whether
they supply absolute or relative values. Other devices, such
as tablets, touch screens, and potentiometers return absolute values (determined
by their measured position). Earlier, I mentioned importance of the concept
of the "dimension of maximum importance." In this example, the choice between
absolute versus relative mode defines that dimension.
The example comes from process control. There are (at least) two philosophies of design that can be followed in such applications. In the first, space multiplexing, there is a dedicated physical transducer for every parameter that is to be controlled. In the second, time multiplexing, there are fewer transducers than parameters. Such systems are designed so that a single device can be used to control different parameters at different stages of an operation.
Let us assume that we are implementing a system based on time multiplexing. There are two parameters, A and B, and a single sliding potentiometer to control them, P. The potentiometer P outputs an absolute value proportional to the position of the handle. To begin with, the control potentiometer is set to control parameter A. The initial settings of A, B, and P are all illustrated in Figure6A. First we want to raise the value of A to its maximum. This we do simply by sliding up the controller, P. This leaves us in the state illustrated in Figure 6B. We now want to raise parameter B to its maximum value. But how can we raise the value of B if the controller is already in its highest position? Before we can do anything we must adjust the handle of the controller relative to the current value of B. This is illustrated in Figure 6C. Once this is done, parameter B can be reset by adjusting P. The job is done and we are in the state shown is Figure 6D
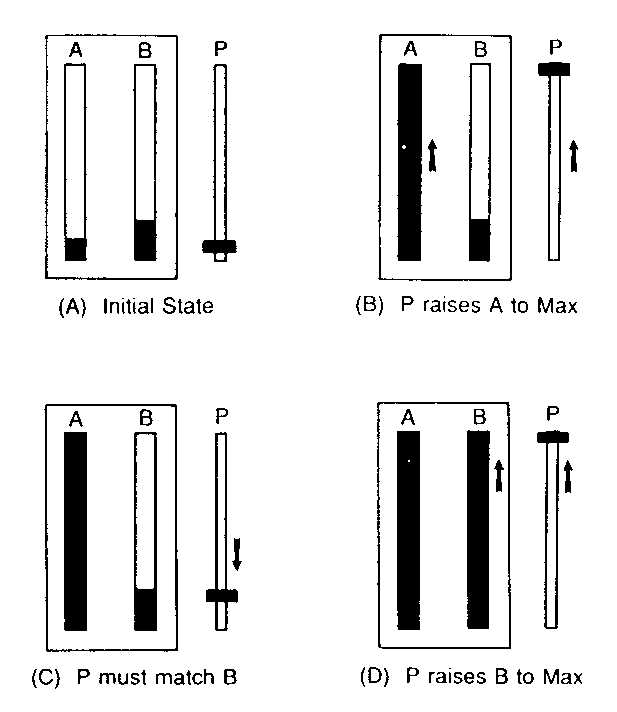
From an operator's perspective, the most annoying part of the above transaction is having to reset the controller before the second parameter can be adjusted. This is called the nulling problem. It is common, takes time to carry out, time to learn, and is a common source of error. Most importantly, it can be totally eliminated if we simply choose a different transducer.FIGURE 6: The Nulling Problem. Potentiometer P controls two parameters, A and B. The initial settings are shown in Panel A. The position of P, after raising parameter A to its maximum value, is shown in Panel B. In order for P to be used to adjust parameter B, it must first be moved to match the value of B (i.e., "null" their difference), as shown in Panels C and D.
The problems in the last example resulted from the fact that we choose a transducer that returned an absolute value based on a physical handle's position. As an alternative, we could replace it with a touch-sensitive strip of the same size. We will use this strip like a one-dimensional mouse. Instead of moving a handle, this strip is "stroked" up or down using a motion similar to that which adjusted the sliding potentiometer. The output in this case, however, is a value whose magnitude is proportional to the amount and direction of the stroke. In short, we get a relative value which determines the amount of change in the parameter. We simply push values up, or pull them down. The action is totally independent of the current value of the parameter being controlled. There is no handle to get stuck at the top or bottom. The device is like a treadmill, having infinite travel in either direction. In this example, we could have "rolled" the value up and down using one dimension of trackball and gotten much the same benefit (since it too is a relative device).
An important point in this example is where the reduction in complexity
occurred: in the syntax of the control language. Here we have a compelling
and relevant example of where a simple change in input device has resulted
in a significant change in the syntactic complexity of a user interface.
The lesson to be learned is that in designing systems in a layered manner
- first the semantics, then the syntax, then the lexical component, and
the devices - we must take into account interaction among the various strata.
All components of the system interlink and have a potential effect
on the user interface. Systems must begin to be designed in an integrated
and holistic way.
If you look at the literature, you will find that there has been a great deal of study on how quickly humans can push buttons, point at text, and type commands. What the bulk of these studies focus on is the smallest grain of the human-computer dialogue, the atomic task. These are the "words" of the dialogue. The problem is, we don't speak in words. We speak in sentences. Much of the problem is applying the result s of such studies is that they don't provide much help in understanding how to handle compound tasks. My thesis is, if you can say it in words in a single phrase, you should be able to express it to the computer in a single gesture. This binding of concepts and gestures thereby becomes the means of articulating the unit tasks of an application.
Most of the tasks which we freeform in interacting with computers are compound. In indicating a point on the display with a mouse we think of what we are doing as a single task: picking a point. But what would you have to specify if you had to indicate the same point by typing? Your single-pick operation actually consists of two sub-tasks: specifying an X coordinate and specifying a Y coordinate. You were able to think of the aggregate as a single task because of the appropriate match among transducer, gesture, and context. The desired one-to-one mapping between concept and action has been maintained. My claim is that what we have seen in this simple example can be applied to even higher-level transactions.
Two useful concepts from music that aid in thinking about phrasing
are tension and closure. During a phrase there is a state
of tension associated with heightened attention. This is delimited by periods
of relaxation that close the thought and state implicitly that another
phrase can be introduced by either party in the dialogue. It is my belief
that we can reap significant benefits when we carefully design our computer
dialogues around such sequences of tension and closure. In manual input,
I will want tension in imply muscular tension.
Think about how you interact with pop-up menus with a mouse. Normally you push down the select button, indicate your choice by moving the mouse, and then release the select button to confirm the choice. Your are in a state of muscular tension throughout the dialogue: a state that corresponds exactly with the temporary state of the system. Because of the gesture used, it is impossible to make an error in syntax, and you have a continual active reminder that you are in an uninterruptable temporary state. Because of the gesture used, there is none of the trauma normally associated with being in a mode. That you are in a mode is ironic, since it is precisely the designers of "modeless" systems that make the heaviest use of this technique. The lesson here is that it is not modes per se that cause problems.
In well-structured manual input there is a kinesthetic connectivity
to reinforce the conceptual connectivity of the task. We
can start to use such gestures to help develop the role of muscle memory
as a means through which to provide mnemonic aids for performing different
tasks. And we can start to develop the notion of gestural self-consistency
across an interface.
What do graphical potentiometer, pop-up menus, scroll-bars, rubber-band lines, and dragging all have in common? Answer: the potential to be implemented with a uniform form of interaction. Work it out using the pop-up menu protocol given above.
The second question is the easier of the two. With a few exceptions, (the Xerox Star, for example), most systems don't encourage two-handed multiple-device input. First, most of our theories about parsing languages (such as the language of our human-computer dialogue) are only capable of dealing with single-threaded dialogues. Second, there are hardware problems due partially to wanting to do parallel things on a serial machine. Neither of these is unsolvable. But we do need some convincing examples that demonstrate that the time, effort, and expense is worthwhile. So that is what I will attempt to do in the rest of this section.
Example 4: Graphics Design Layout
I am designing a screen to be used in a graphics menu-based system.
To be effective, care must be taken in the screen layout. I have to determine
the size and placement of a figure and its caption among some other graphical
items. I want to use the tablet to preview the figure in different locations
and at different sizes in order to determine where it should finally appear.
The way that this would be accomplished with most current systems is to
go through a cycle of position-scale-position-... actions. That is, in
order to scale, I have to stop positioning, and vice versa.
This is akin to having to turn off your shower in order to adjust the water temperature.
An alternative design offering more fluid interaction is to position
it with one hand and scale it with the other. By using two separate devices
I am able to perform both tasks simultaneously and thereby achieve a far
more fluid dialogue.
Example 5: Scrolling
A common activity in working with many classes of program is scrolling
through data, looking for specific items. Consider scrolling through the
text of a document that is being edited. I want to scroll till I find what
I'm looking for, then mark it up in some way. With most window systems,
this is accomplished by using a mouse to interact with some (usually arcane)
scroll bar tool. Scrolling speed is often difficult to control and the
mouse spends a large proportion of its time moving between the scroll bar
and the text. Furthermore, since the mouse is involved in the scrolling
task, any ability to mouse ahead (i.e. start moving the mouse towards
something before it appears on the display) is eliminated. If a mechanism
were provided to enable us to control scrolling with the nonmouse hand,
the whole transaction would be simplified.
There is some symmetry here. It is obvious that the same device used to scale the figure in the previous example could be used to scroll the window in this one. Thus, we ourselves would be time-multiplexing the device between the scaling of examples. An example of space-multiplexing would be the simultaneous use of the scrolling device and the mouse. Thus, we actually have a hybrid type of interface.
Example 6: Financial Modeling
I am using a spread-sheet for financial planning. The method used to
change the value in a cell is to point at it with a mouse and type the
new entry. For numeric values, this can be done using the numeric keypad
or the typewriter keyboard. In most such systems, doing so requires that
the hand originally on the mouse moves to the keyboard for typing. Generally,
this requires that the eyes be diverted from the screen to the keyboard.
Thus, in order the check the result, the user must then visually relocate
the cell on a potentially complicated display.
An alternative approach is to use the pointing device in one hand and the numeric keyboard in the other. The keypad hand can then remain in the home position, and if the user can touch-type on the keypad, the eyes need never leave the screen during the transaction.
Note that in this example the tasks assigned to the two hands are not even being done in parallel. Furthermore, a large population of users - those who have to take notes while making calculations - have developed keypad touch-typing facility in their nonmouse hand (assuming that the same hand is used for writing as for the mouse). So if this technique is viable and presents no serious technical problems, then why is it not in common use? One arguable explanation is that on most systems the numeric keypad is mounted on the same side as the mouse. Thus, physical ergonomics prejudice against the approach.
Just because two-handed input is not always suitable is no reason to reject it. The scrolling example described above requires trivial skills, and it can actually reduce errors and learning time. Multiple-handed input should be one of the techniques considered in design. Only its appropriateness for a given situation can determine if it should be used. In that, it is no different than any other technique in our repertoire.
Example 7: Financial Modeling Revisited
Assume that we have implemented the two-handed version of the spreadsheet
program described in Example 6. In order to get the benefits that I suggested,
the user would have to be a touch-typist on the numeric keypad. This is
a skilled task that is difficult to develop. There is a temptation, then,
to say "don't use it." If the program was for school children, then perhaps
that would be right. But consider who uses such programs: accountants,
for example. Thus, it is reasonable to assume that a significant proportion
of the user population comes to the system with the skill already developed.
By our implementation, we have provided a convenience for those with the
skill, without imposing any penalty on those without it - they are no worse
off than they would be in the one-handed implementation.
Know your user
is just another (and important) consideration that can be exploited in
order to tailor a better user interface.
Second, we must look outward from the devices themselves to how they fit into a more global, or holistic, view of the user interface. All aspects of the system affect the user interface. Often problems at one level of the system can be easily solved by making a change at some other level. This was shown for example, in the discussion of the nulling problem.
That the work needs to be done is clear. Now that we've made up our
minds about that, all that we have to do is assemble good tools and get
down to it. What could be simpler?
Some of the notions of "chunking" and phrasing discussed are expanded upon in Buxton (1982) and Buxton, Fiume, Hill, Lee and Woo (1983). The chapter by Miyata and Norman in this book gives a lot of background on performing multiple tasks, such as in two-handed input. Buxton (1983) presents an attempt to begin to formulate a taxonomy of input devices. This is done with respect to the properties of devices that are relevant to the styles of interaction that they will support. Evans, Tanner, and Wein (1981) do a good job of demonstrating the extent to which one device can emulate properties of another. Their study uses the tablet to emulate a large number of other devices.
A classic study that can be used as a model for experiments to compare
input devices can be found in Card, English, and, Burr (1978). Another
classic study which can serve as the basis for modeling some aspects of
performance of a given user performing a given task using given transducers
is Card, Moran, and Newell (1980). My discussion in this chapter illustrates
how, in some cases, the only way that we can determine answers is by testing.
This means prototyping that is often expensive. Buxton, Lamb, Sherman and
Smith (1983) present one example of a tool that can help this process.
Olsen, Buxton, Ehrich, Kasik, Rhyne, and Sibert (1984) discusses the environment
in which such tools are used. Tanner and Buxton (1985) present a general
model of User Interface Management Systems. Finally, Thomas and Hamlin
(1983) present an overview of "User Interface Management Tools". Theirs
is a good summary of many user interface issues, and has a fairly comprehensive
bibliography.
Buxton, W. (1986). Chunking and phrasing and the design of human-computer dialogues, Proceedings of the IFIP World Computer Congress, Dublin, Ireland, 475-480.
Buxton, W. (1983). Lexical and Pragmatic Considerations of Input Structures. Computer Graphics 17 (1), 31-37.
Buxton, W., Fiume, E., Hill, R., Lee, A. & Woo, C. (1983). Continuous Hand-Gesture Driven Input. Proceedings of Graphics Interface '83, 9th Conference of the Canadian Man-Computer Communications Society, Edmonton, May 1983, 191-195.
Buxton, W., Lamb, M. R., Sherman, D. & Smith, K. C. (1983). Towards a Comprehensive User Interface Management System. Computer Graphics 17(3). 31-38.
Card, S., English & Burr. (1978), Evaluation of Mouse, Rate-Controlled Isometric Joystick, Step Keys and Text Keys for Text Selection on a CRT, Ergonomics, 21(8), 601-613.
Card, S., Moran, T. & Newell, A. (1980). The Keystroke Level Model for User Performance Time with Interactive Systems, Communications of the ACM, 23(7), 396-410.
Card, S., Moran, T. & Newell, A. (1983). The Psychology of Human-Computer Interaction, Hillsdale, N.J.: Lawrence Erlbaum Associates.
Evans, K., Tanner, P. & Wein, M. (1981). Tablet-Based Valuators That Provide One, Two, or Three Degrees of Freedom. Computer Graphics, 15 (3), 91-97.
Foley, J.D. & Wallace, V.L. (1974). The Art of Graphic Man-Machine Conversation, Proceedings of IEEE, 62 (4), 462-4 7 0.
Foley, J.D., Wallace, V.L. & Chan, P. (1984). The Human Factors of Computer Graphics Interaction Techniques. IEEE Computer Graphics and Applications, 4 (11), 13-48.
Guedj, R.A., ten Hagen, P., Hopgood, F.R., Tucker, H. and Duce, D.A. (Eds.), Methodology of Interaction, Amsterdam: North Holland Publishing, 127-148.
Olsen, D. R., Buxton, W., Ehrich, R., Kasik, D., Rhyne, J. & Sibert, J. (1984). A Context for User Interface Management. IEEE Computer Graphics and Applications 4(12), 33-42.
Tanner, P.P. & Buxton, W. (1985). Some Issues in Future User Interface Management System (UIMS) Development. In Pfaff, G. (Ed.), User Interface Management Systems, Berlin: Springer Verlag, 67- 79.
Thomas and Hamlin (1983)